HyBrush: A Hybrid UAV Brushing System for PV monitoring and cleaning (QNRF - UREP)
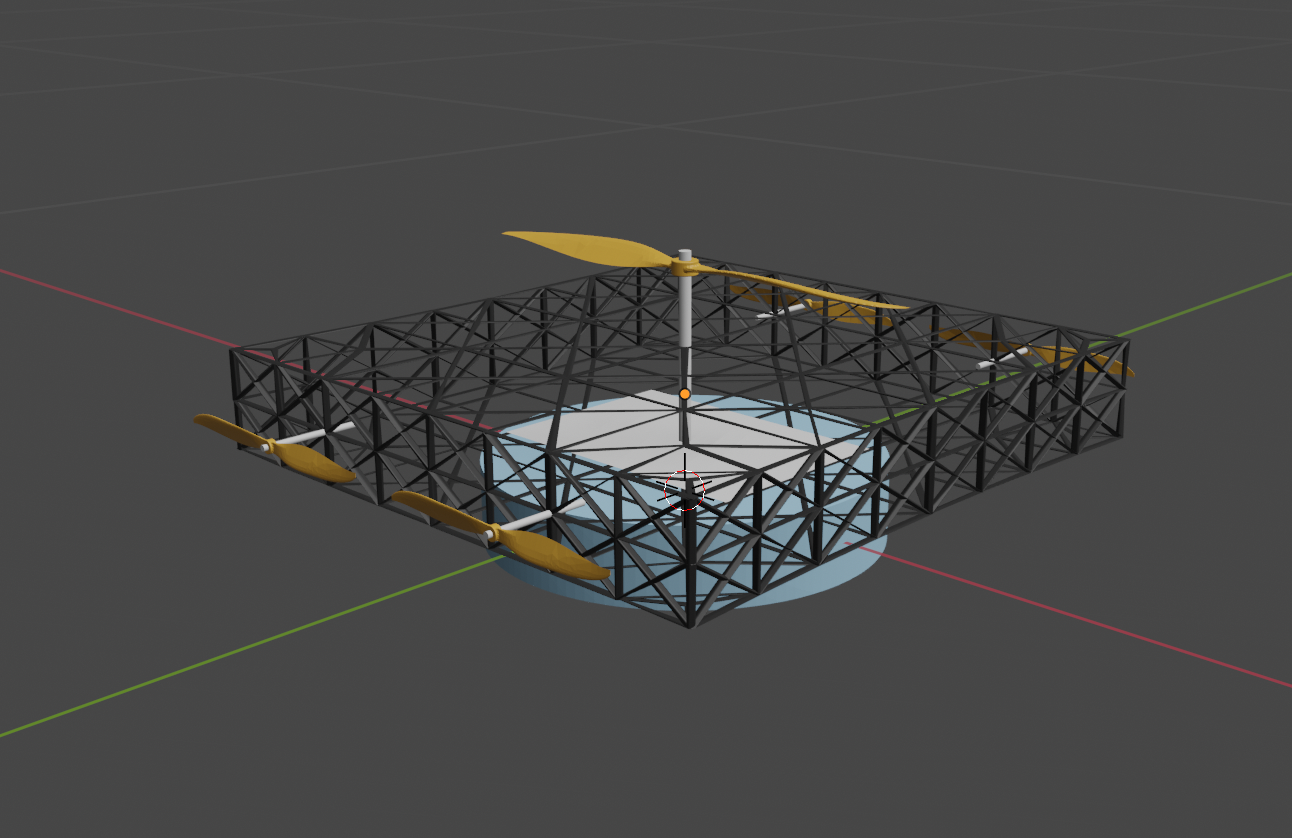
In this project, we design and develop a novel, hybrid unmanned aerial system (HyBrush) for the brush-based dry-cleaning and inspection of solar Photo-Voltaic (PV) systems. In general, PV monitoring and maintenance job is labor-intensive. Also, most of PV systems are installed at remote areas or building rooftops where they are not easy to reach. Thus, it is costly – and some time, even dangerous -- to assign labor workforce to perform PV inspection and maintenance because of the high risk and extensive site work. In the particular case of Qatar, the unique desert climate condition, and the issues of soiling and extremely hot outdoor temperature make PV maintenance even more challenging than other areas in the world. While several successful deployments of robotics and autonomous systems for PV cleaning and inspection can be found in the literature, none of them is capable of achieving high-performance dust removal to fit the climate variations under Qatar weather conditions and, at the same time, providing cost-effective, frequent, high-resolution PV inspection. Our hybrid drone proposal will have the capability of performing adaptive brush-based dry-cleaning tasks of the PV panels’ surfaces, and also of autonomously landing and moving on top of PV panels while using a thermal camera to capture close-distance images. These will not only meet the requirements for frequent and automatic cleaning and inspection of PV panels, but also has advantages such as closer image-capture distance, lower requirements for onboard cameras, and acquisition of high-resolution images. As a result, the system will enable an increase of the electricity production due to high-efficiency maintenance of PV systems. The socio-economic interests include inspection of large PV installations, close-range PV panel inspection using thermal imaging, and effective brush-based dry-cleaning for dust removal.
Related Publications
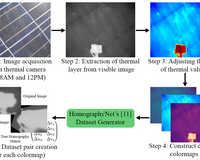
Thermal Homography in Photovoltaic Panels: Evaluating Deep Learning and Feature-Based Methods
IEEE Texas Power and Energy Conference (TPEC), 2025
PDF
Performance Evaluation of Feature Detectors and Descriptors with Close-Range Solar Panel Images
IEEE International Conference on Visual Communications and Image Processing (VCIP), 2024
PDF