Optimizing Multi-Robot Task Planning with Sporadic Communication in Large-Area Missions (CMUQ-QSIURP)

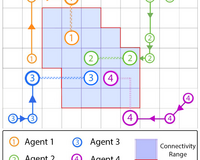
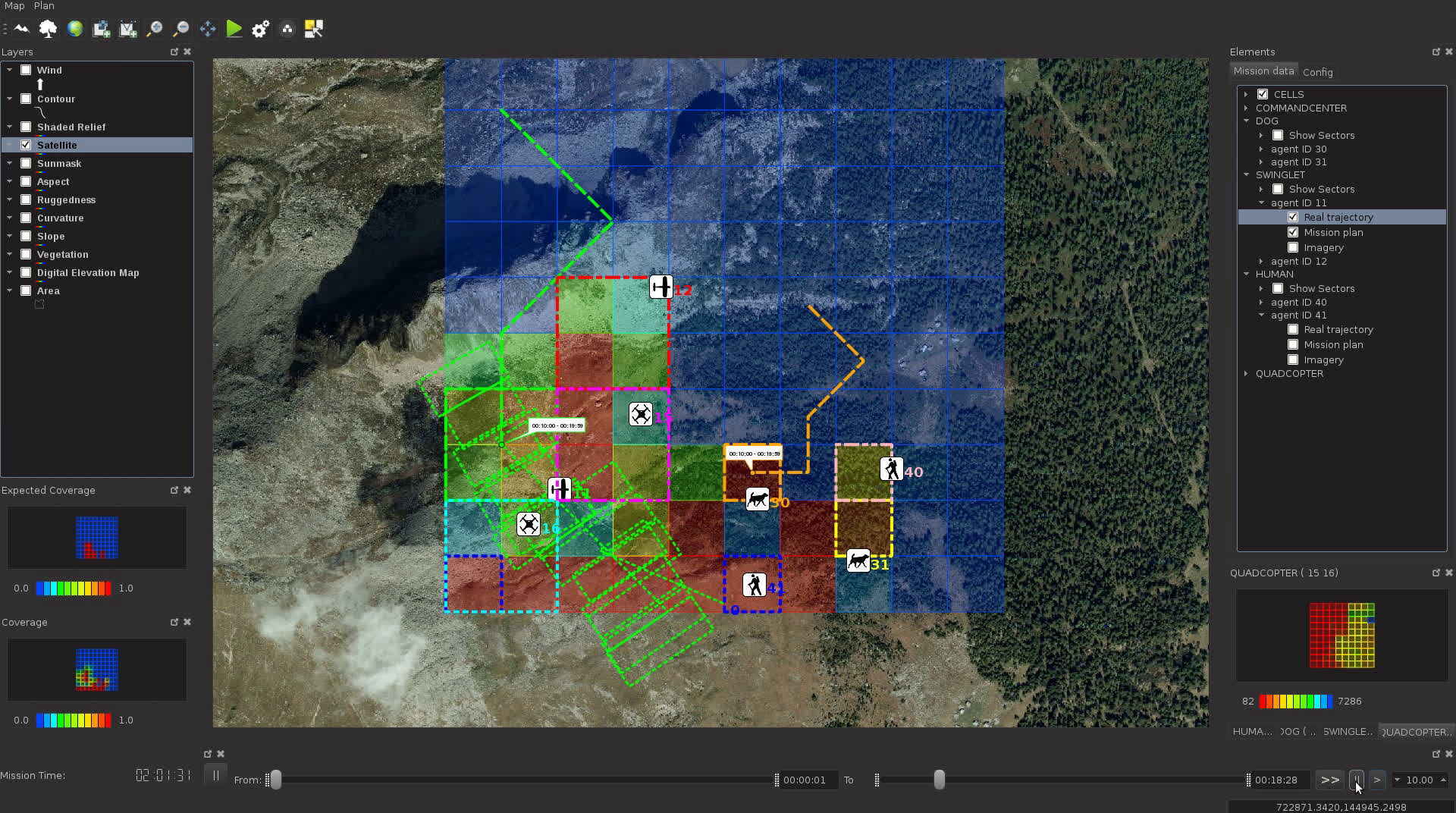
This project explores the deployment of a mobile multi-agent team—comprising autonomous agents with diverse sensory and motor skills—tasked with completing various spatially distributed missions over large areas. To maximize overall utility, the project involves optimizing task assignments, scheduling, and duration, considering the need for effective communication among agents, including humans, animals, and robots, in environments lacking established network infrastructure. The proposed Mixed-Integer Linear Programming (MILP) model introduces a flexible strategy that balances task performance with sporadic connectivity, improving mission efficiency in scenarios such as search and rescue, environmental monitoring, and area surveillance.
Related Publications
Spatially-Distributed Missions With Heterogeneous Multi-Robot Teams
IEEE Access, 2021
PDF