Spatially-Distributed Missions With Heterogeneous Multi-Robot Teams
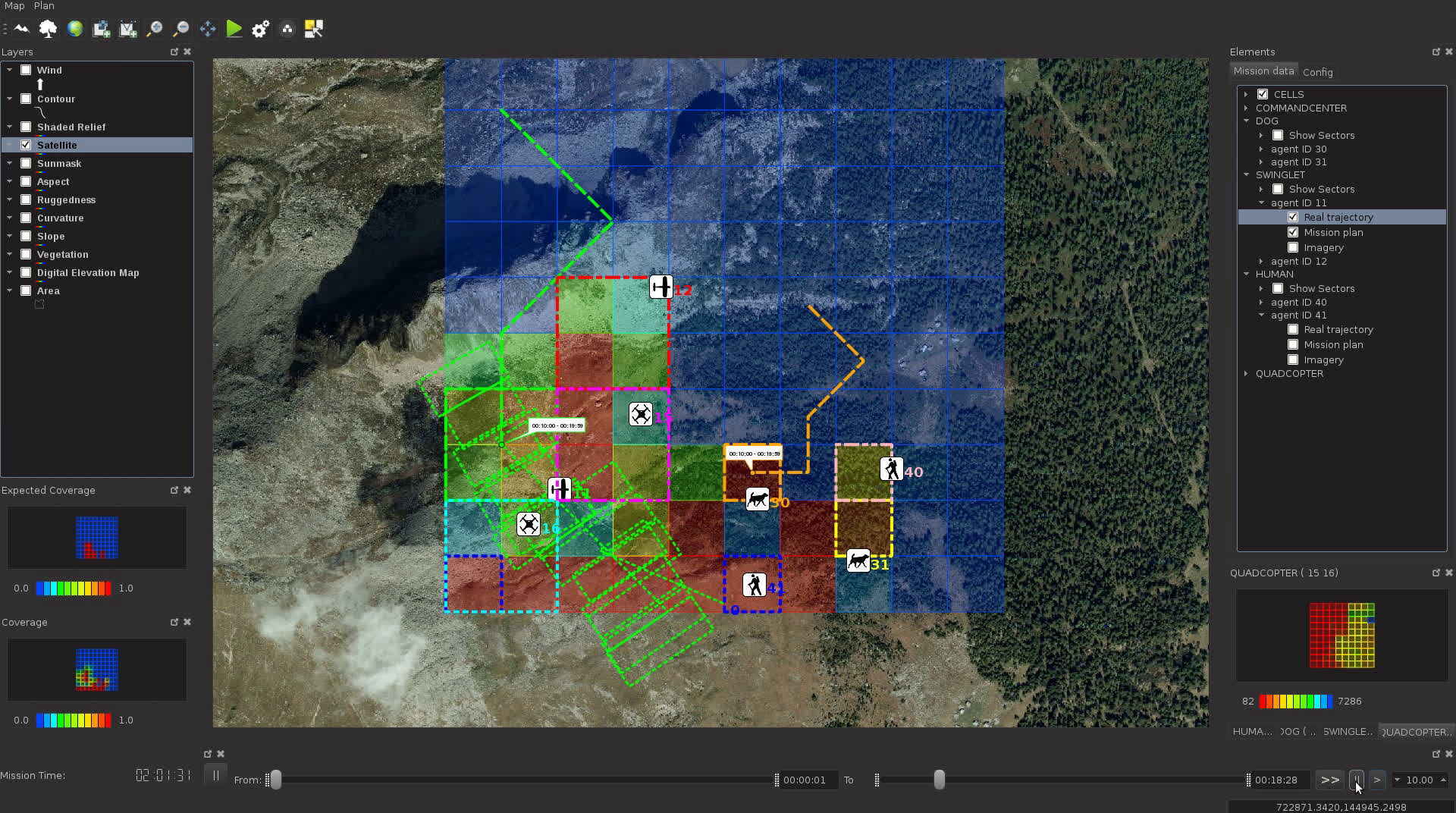
This work studies coordinated mission planning for heterogeneous multi-robot teams operating over spatially distributed tasks, with formulations that balance mission utility and execution constraints.