
Related Publications

Towards Practical and Deployable Infrastructure-Free Indoor Localization
To appear in Proceedings of IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), 2026
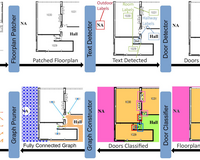
Tesseract: Unfolding Navigable Graph Representations from Low-Semantic Floor Plans
Proceedings of the 33rd ACM International Conference on Advances in Geographic Information Systems (SIGSPATIAL/GIS), 2025
PDF
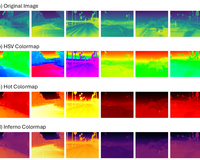
A Deployable Privacy-Preserving Thermal-Based Obstacle Detection System for Indoor Navigation
IEEE International Conference on Communications (ICC), 2025
PDF
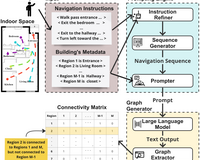
Text2Map: From Navigational Instructions to Graph-Based Indoor Map Representations Using LLMs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
PDF